制御工学研究室
制御工学とは
制御工学は,機械などを意のままに操り,自律的な動作の実現を可能にする方法論です.例えば,ロボットの制御,航空機や船舶の自動航行,自動車の自動車間制御や燃料噴射装置の電子制御,HDDやDVDヘッドの精密位置決め制御,人工衛星の制御,などが有り,私たちの生活には自動制御工学が広く活用されています.
倒立振子の自動制御
自動制御を行うためには,制御する対象の状態を観測することが必要です.その上で,外力などを対象に加えることによって,所望の状態になるよう制御します.対象物の状態を観測する機器は「センサ」と言い,対象に外力等を加える機器は「アクチュエータ」と呼ばれます.自動制御の仕組みを知るために,「倒立振子(とうりつしんし)」の自動制御について説明します.
皆さんは,小学生の頃,掃除用の箒を手のひらの上に立てて遊んだことは有りませんか.倒立振子とは,手のひらの上に棒を鉛直に立てる動作を機械に行わせるものです.図の様に,モーターによって左右に走行可能な台車の上に,自由に回転可能な棒を搭載しています.棒と台車はフリージョイントで結合されているので,棒だけを回して立てることはできず,台車を左右に動かすことによって棒を鉛直に立てます.
-

- ◆マニュアル操作による倒立◆
-
ジョイスティックを使って,台車を左右に動かし,棒を立てることにチャレンジしましたが,上手く立てることはなかなか難しい.
倒立振子マニュアル操作の動画 - ◆自動制御による倒立◆
-
自動制御工学を利用して台車の動きを制御すると,いとも簡単に棒を倒立させることができます.
倒立振子自動制御の動画
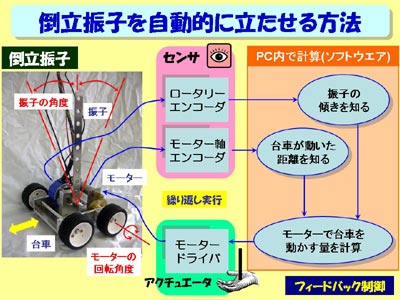
倒立振子の制御の概要
では,どのようにして自動的に棒を立てることができるのでしょうか.まず,棒の傾き角度をセンサ(エンコーダ)によって調べます.また,台車の位置も同じようにセンサによって観測します.その傾き角度に基づいて,棒を鉛直に立たせるためのモーターの出力を適切に決め,モーターを動かします.この処理を0.01[秒]ごとに繰り返すことによって,倒立振子を立たせることに成功しています.人間が手のひらの上で棒を立てる動作と対比させると,センサは人の目,台車のモーターは手のひらの動きに対応します.そして,センサ情報に基づいてモーターを「適切に」動かす量を決めている部分が制御アルゴリズムであり,人の頭脳に対応しています.つまり,制御工学は機械を自律的に動かすための頭脳に相当します.したがって,制御工学は機械の自動化,自律化に不可欠な技術なのです.